آیا شما هم قصد دارید به پروژه خود، حرکت دورانی اضافه کنید؟ اگر چنین است، پس حتما به فکر راه اندازی سروو موتور با آردوینو که البته موضوع این مقاله است، افتادهاید. اما بهتر است پیش از آغاز راه اندازی این موتور، کمی بیشتر در مورد آن بدانید.
یکی از ویژگیهای این موتور این است که برخلاف موتورهای DC، با دقت بیشتری میتوانید موقعیت آنها را کنترل کنید. علاوه بر این، میتوانید از این موتور در بسیاری از پروژههای رباتیک خود نیز به عنوان مثال برای حرکت چرخشی چرخهای جلویی مدل کنترل از راه دور (RC) و چرخش سنسور دیدبان ربات استفاده کنید.
در ادامه به جزئیات بیشتری در مورد این موتور میپردازیم و راه اندازی آن را آغاز میکنیم.
سروو چیست؟
سروو (Servo) یک مفهوم کلی برای سیستمهای کنترل حلقه بسته است.
یک سیستم حلقه بسته برای تنظیم سرعت و جهت چرخش موتور، از فیدبک استفاده میکند تا به این شکل به نتیجه مطلوب برسد.
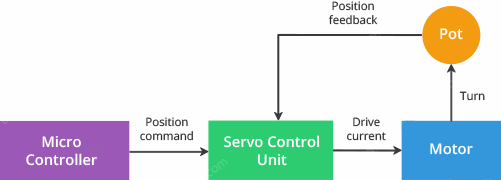
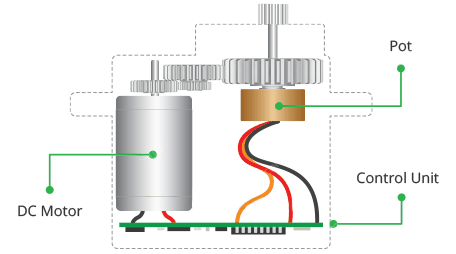
سروو موتورهای RC نیز عملکرد مشابهی دارند. این سروو موتورها دارای یک موتور DC کوچک هستند که از طریق یک گیربکس به شافت خروجی متصل میشوند. شافت خروجی نیز که به یک پتانسیومتر (pot) متصل است، بازوی سروو را حرکت میدهد.
پتانسیومتر، فیدبک موقعیت را برای واحد کنترل سروو تامین میکند. واحد کنترل نیز با مقایسه موقعیت لحظهای موتور با موقعیت مورد نظر، موقعیت واقعی آن را براساس میزان خطا تصحیح میکند تا موتور در موقعیت مورد نظر قرار بگیرد.
نحوه کار سروو موتور
برای راه اندازی سروو موتور با آردوینو ، حتما باید با نحوه عملکرد این موتور آشنا شوید.
شما میتوانید با ارسال یک سری پالس به خط سیگنال، سروو موتور را کنترل کنید. سروو موتورهای آنالوگ معمول، تقریبا هر ۲۰ میلی ثانیه یک پالس دریافت میکنند ( یه عبارتی سیگنال باید ۵۰ هرتز باشد). همانطور که در تصویر زیر مشاهده میکنید، عرض این پالسها موقعیت زاویهای شافت سروو موتور را تعیین میکنند.
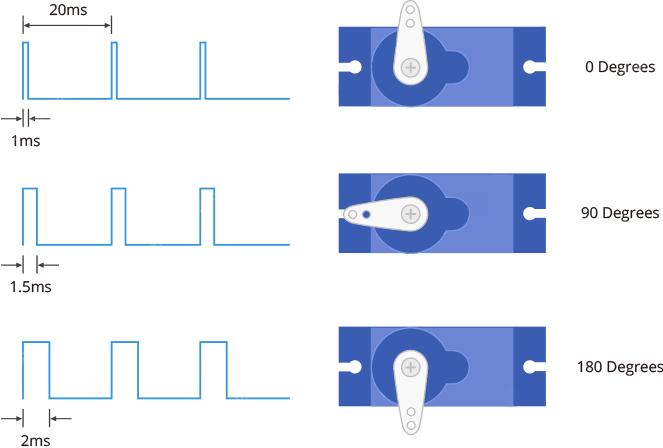
- اگر پالس به مدت زمان ۱ میلی ثانیه high باشد، زاویه سروو صفر درجه است.
- اگر پالس به مدت زمان ۱.۵ میلی ثانیه high باشد، سروو در موقعیت مرکزی قرار میگیرد.
- اگر پالس به مدت زمان ۲ میلی ثانیه high باشد، زاویه سروو ۱۸۰ درجه خواهد بود.
- پالسهایی با عرض پالس بین ۱ تا ۲ میلی ثانیه باعث حرکت شافت سروو در گستره ۱۸۰ درجه خواهند شد.
نکته:
برخی اوقات ممکن است دوره تناوب پالسها در برندهای مختلف سروو موتور متفاوت باشد. (به عنوان مثال دوره تناوب پالسها میتواند ۰.۵ میلی ثانیه برای صفر درجه و ۲.۵ میلی ثانیه برای ۱۸۰ درجه باشد).
پینهای سروو موتور
سروو موتورها معمولا دارای سه پین هستند. این پینها عبارت اند از:
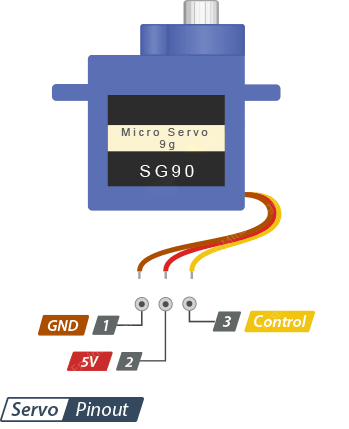
پین GND پین زمین مشترک مدار منطقی و موتور است.
پین 5V برای اعمال توان الکتریکی به سروو است.
پین Control ورودی سیستم کنترل است.
نکته:
رنگ سیمها در سروو موتورهای مختلف ممکن است متفاوت باشد، اما در همه آنها، سیم تغذیه 5V به رنگ قرمز، سیم GND به رنگ مشکی یا قهوهای و سیم Control نیز معمولا نارنجی یا زرد رنگ است.
سیم کشی – راه اندازی سروو موتور با آردوینو
اکنون که با این موتور و پینهای آن آشنا شدید، زمان راه اندازی سروو موتور با آردوینو رسیده است. در این پروژه از برد آردوینو UNO استفاده میکنیم. البته اگر شما بردهای دیگر آردوینو را تهیه کردهاید، باز هم میتوانید طبق این مقاله پیش بروید اما ممکن است پین بردهای مختلف آردوینو کمی باهم متفاوت باشند. به همین دلیل هنگام راه اندازی با بردهای دیگر حتما به این موضوع دقت کنید.